
Prices include GST.
Advanced Kits
Filters







Frequently Asked Questions
-
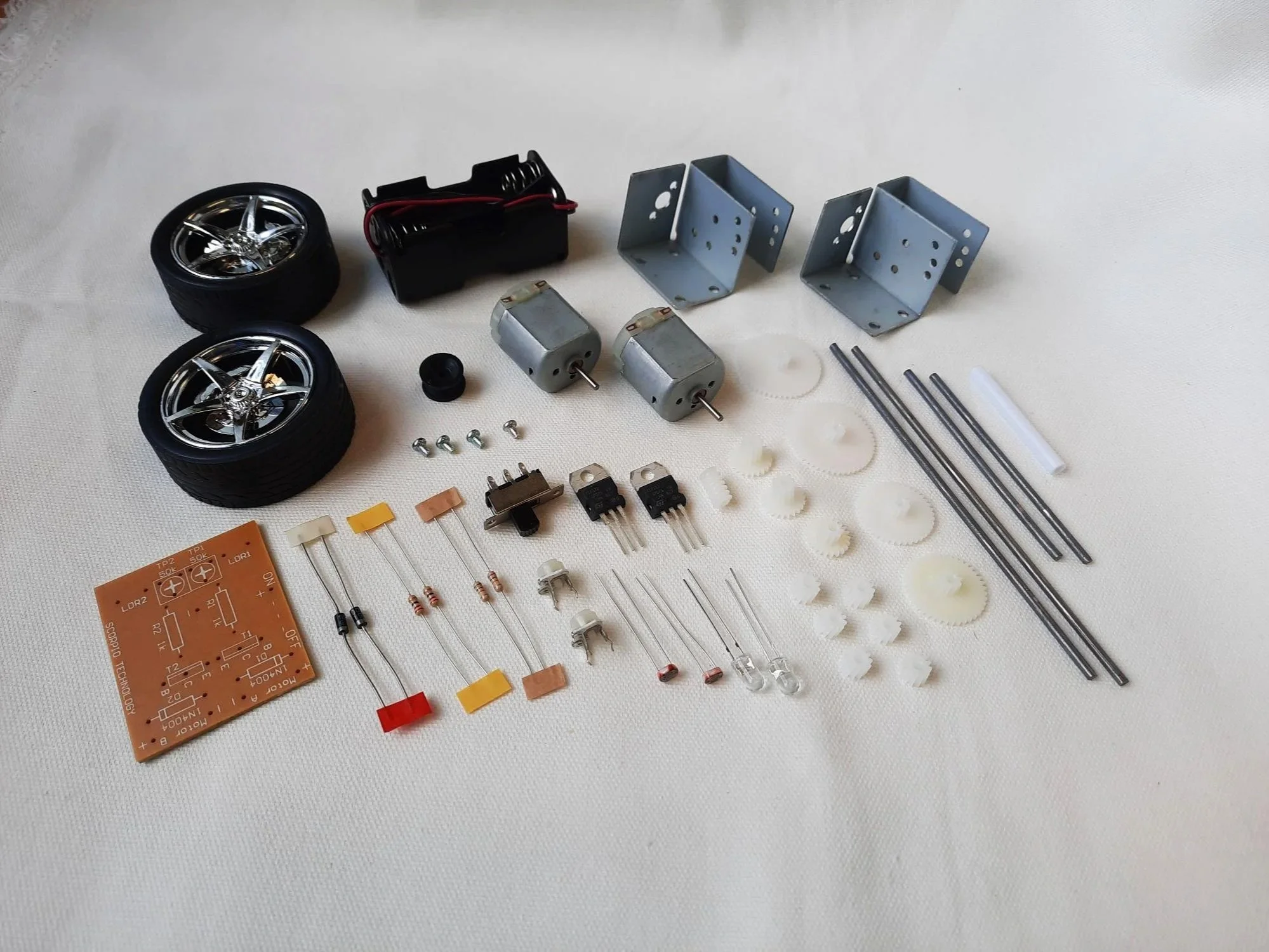
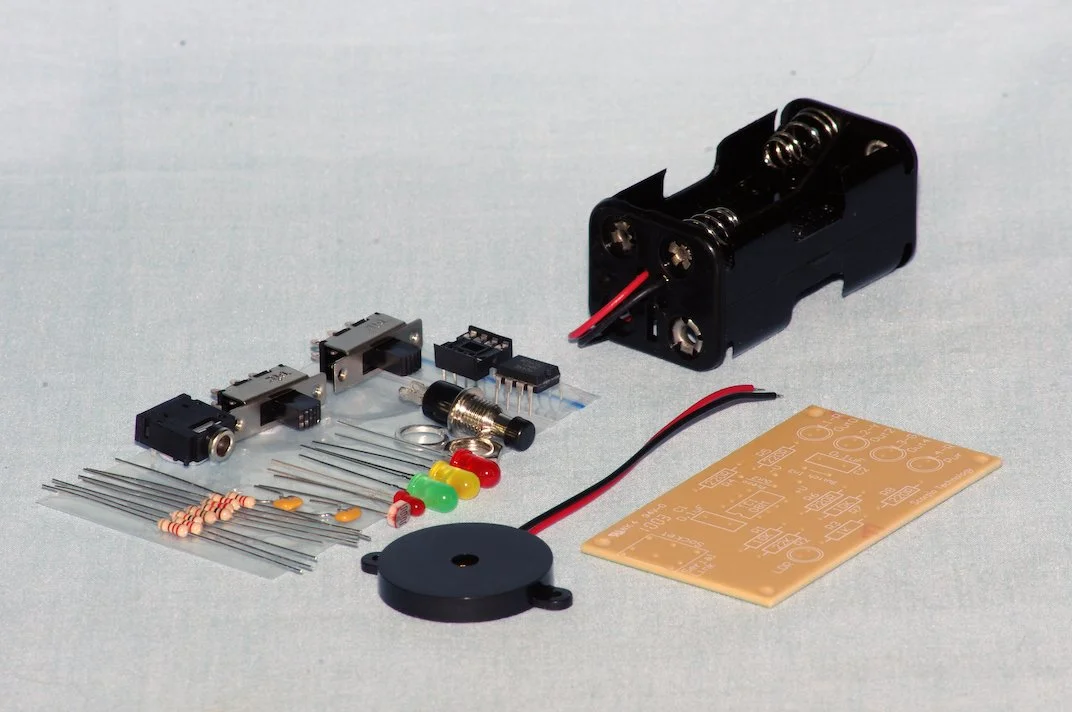
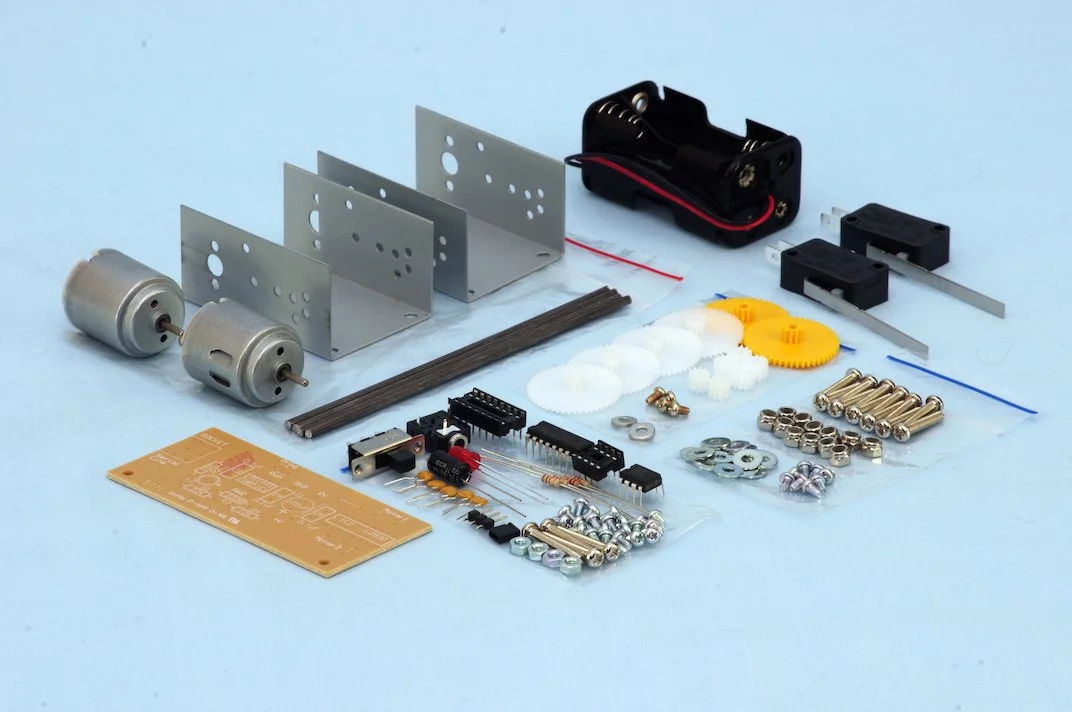
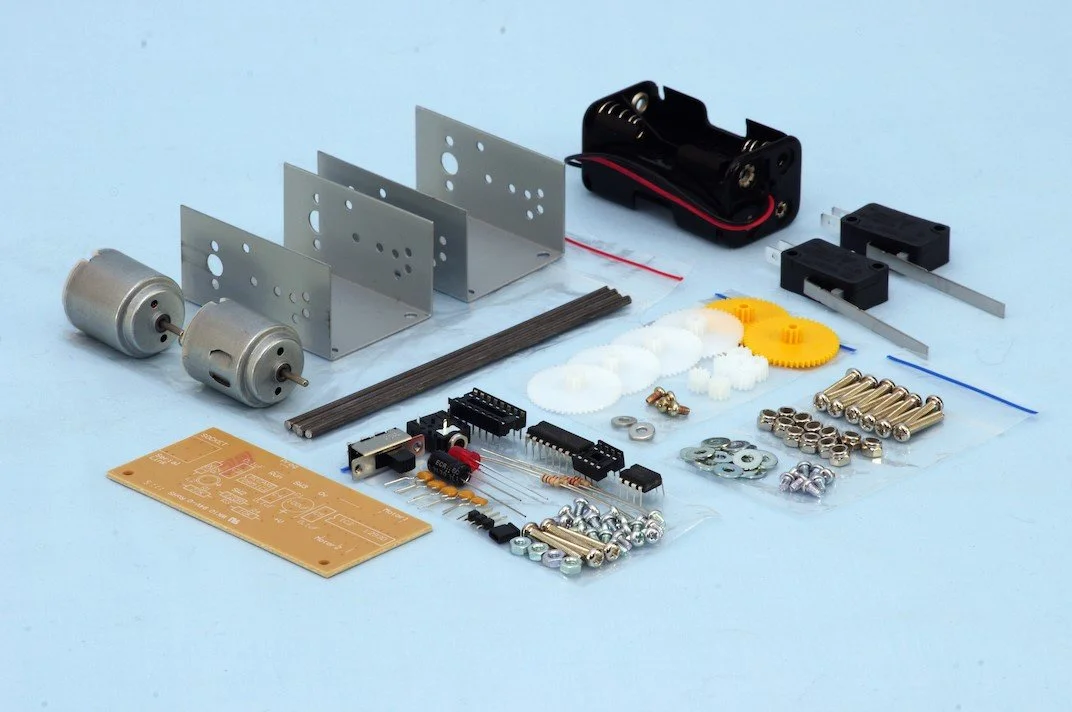
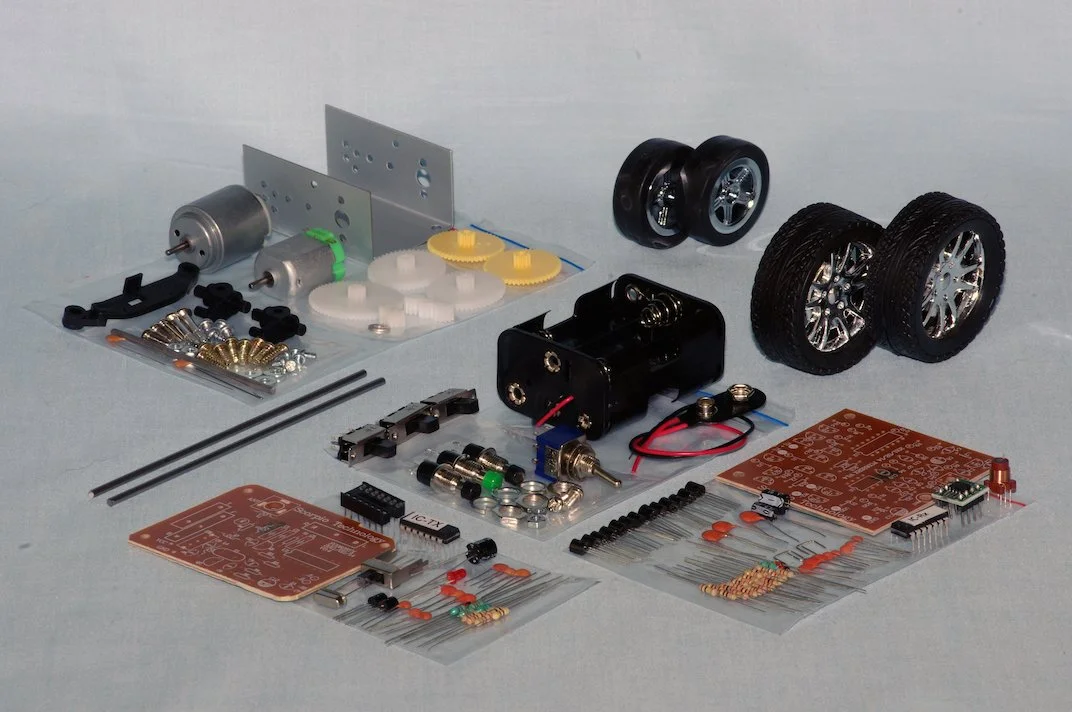
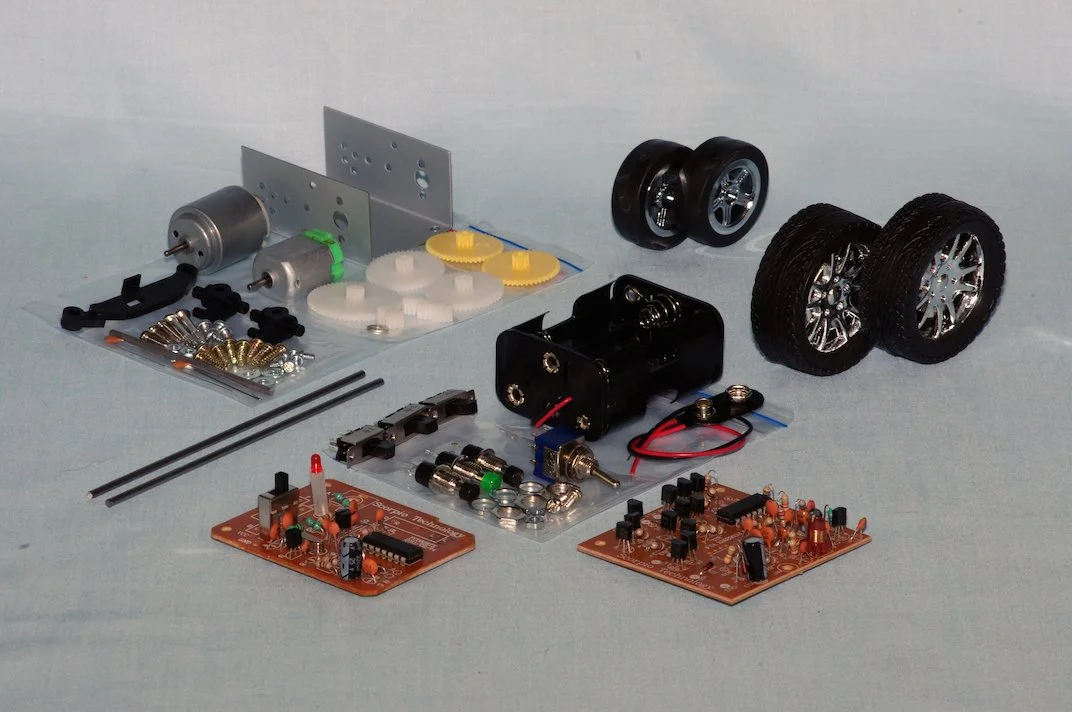
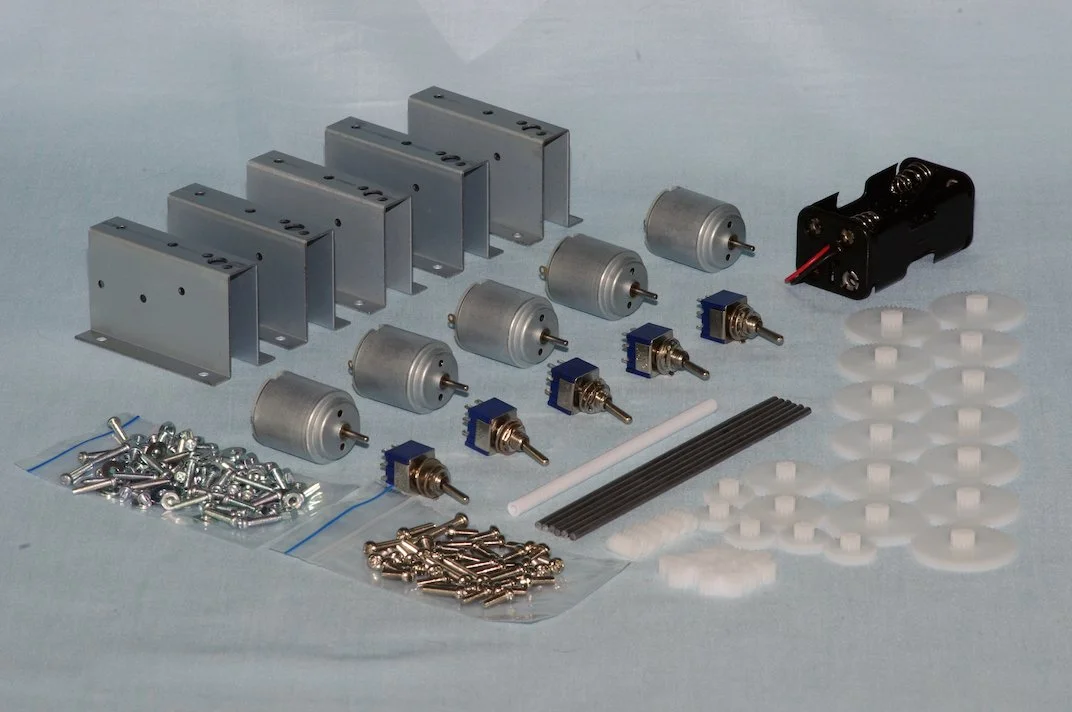
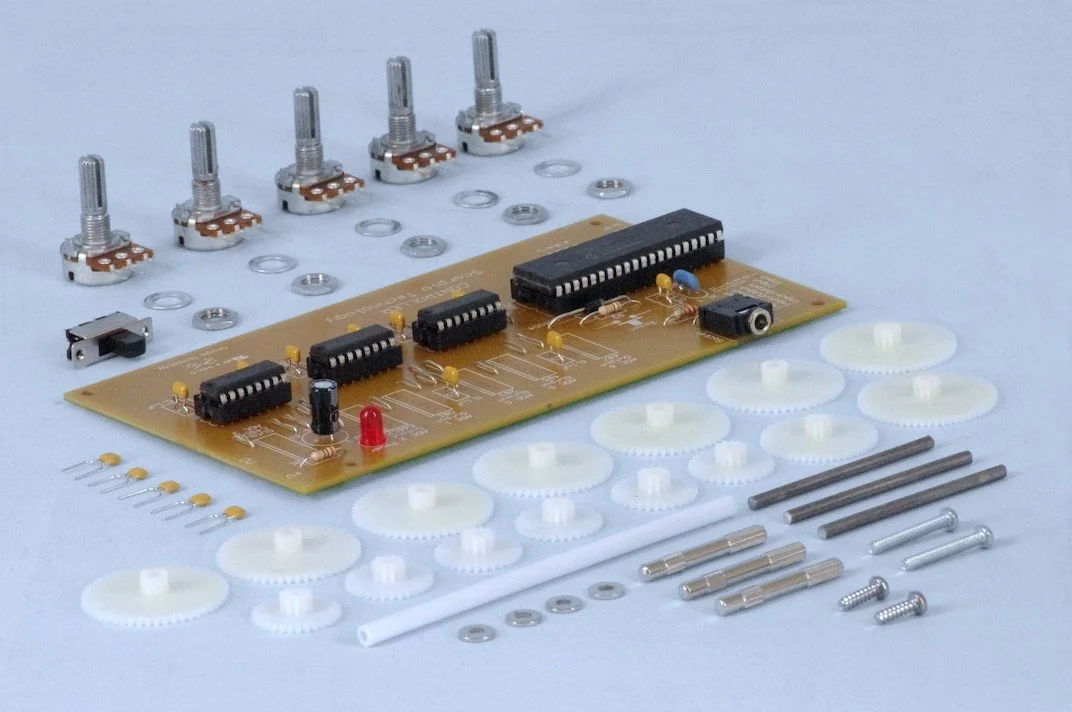
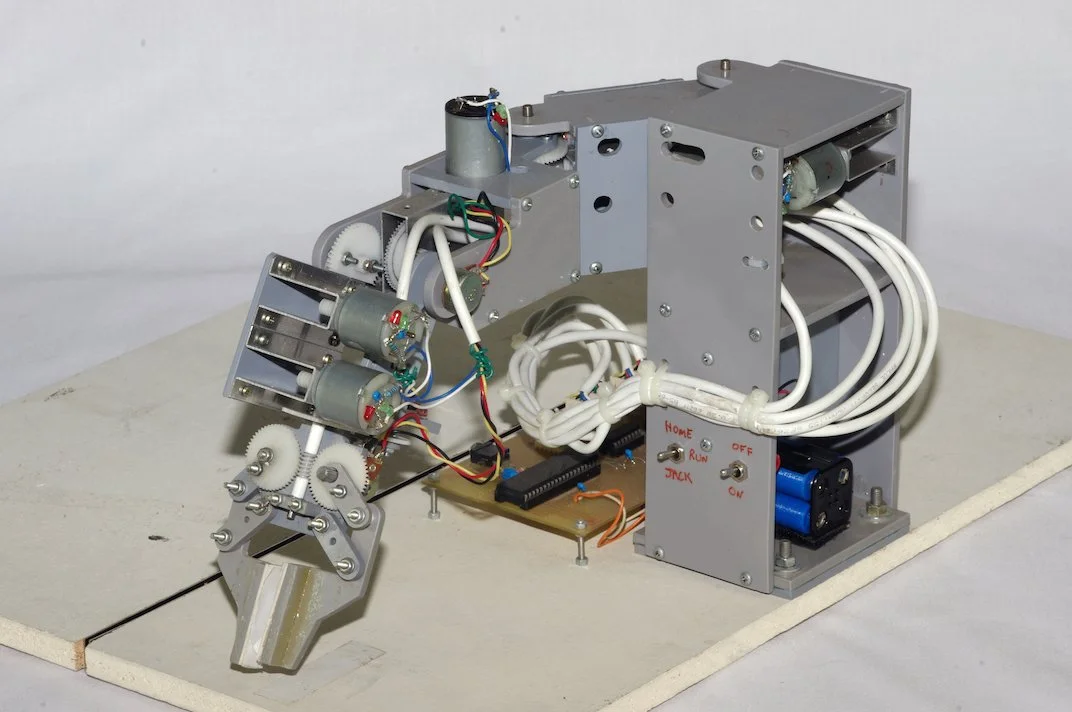
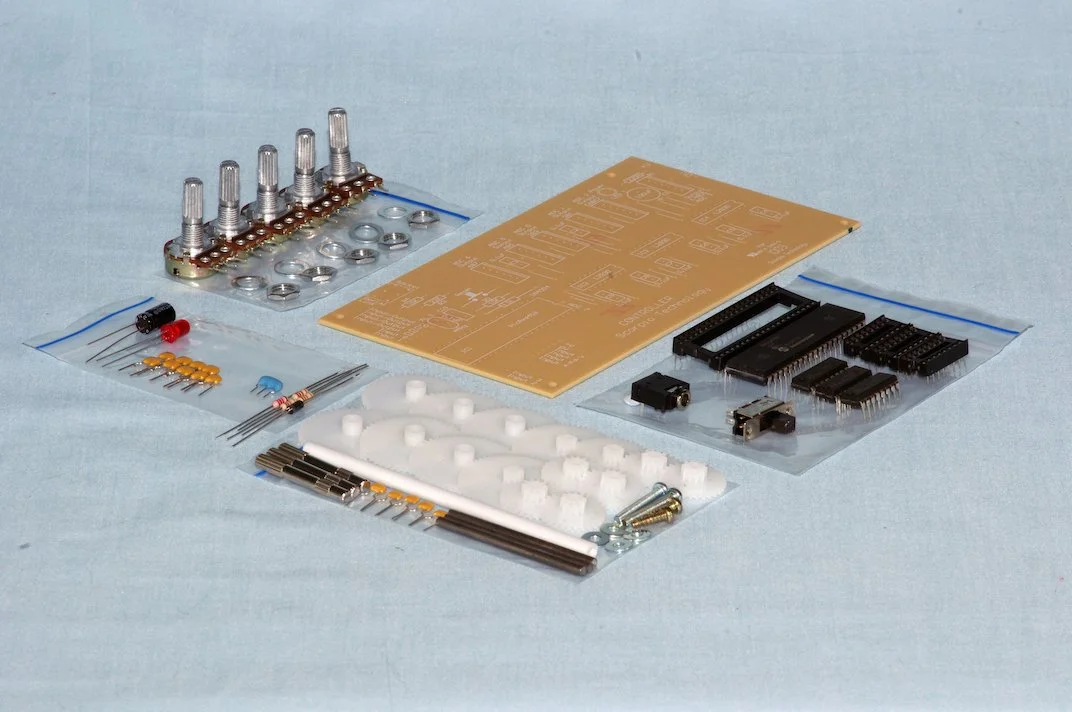
Our kits contain all the electrical, electronic and mechanical components needed to build the device (only). The teacher supplies readily available material for wiring, making body parts, etc. – NO BODY PARTS OR WIRES ARE INCLUDED in the kits (unless otherwise specified). Each order includes comprehensive instructions / Teaching Unit.
-
The legend (included in each kit description) shows how we have graded the kits. These are a guideline only – construction times can vary considerably, depending on the student’s existing knowledge, skills and experience, and the amount of resources and design input expected.
-
Overviews for our kits can be obtained from our website. Each Overview has a description of the kit, what is provided in the kit, additional items and tools that may be required, information about the project, and where applicable, what theory is covered. These Overviews don’t contain any assembly instructions – those are provided with your order. Otherwise, you can phone or email us, to send you a FREE copy of the teaching unit for any kits that you may be interested in.
-
You can reach us anytime via our contact page or email. We aim to respond quickly—usually within one business day.
-
We offer bulk pricing for large order quantities. Each kit description includes any bulk pricing based on the quantities purchased.